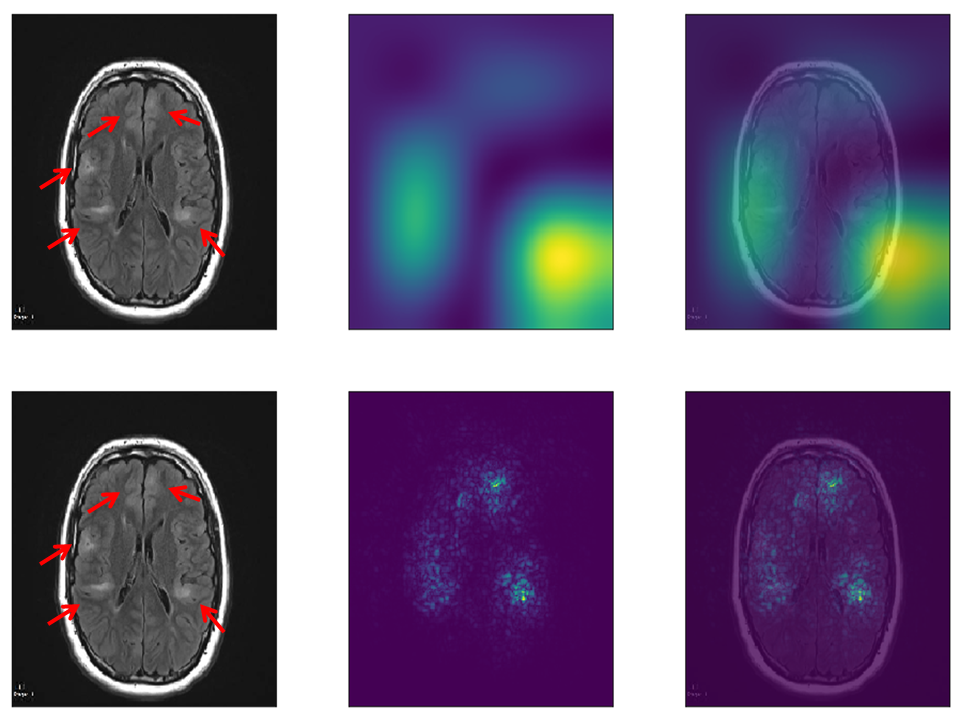
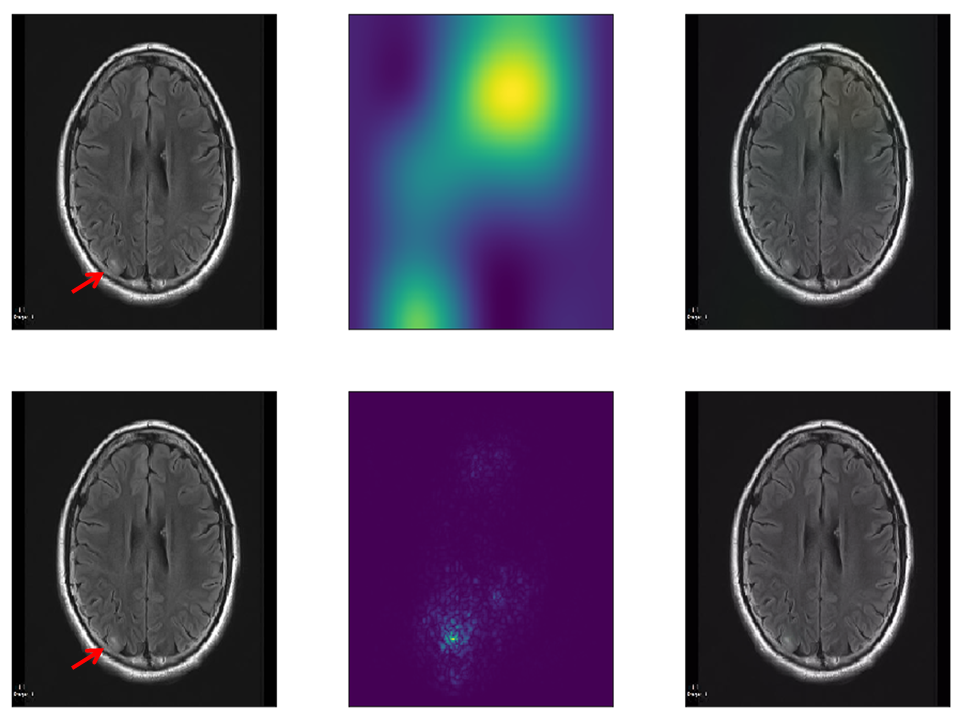
The first column represents the original image, the second column, the map, and the third column the map superimposed on the original image. The first row represents the gradient-weighted class activation map, and the second row represents the saliency map.¶
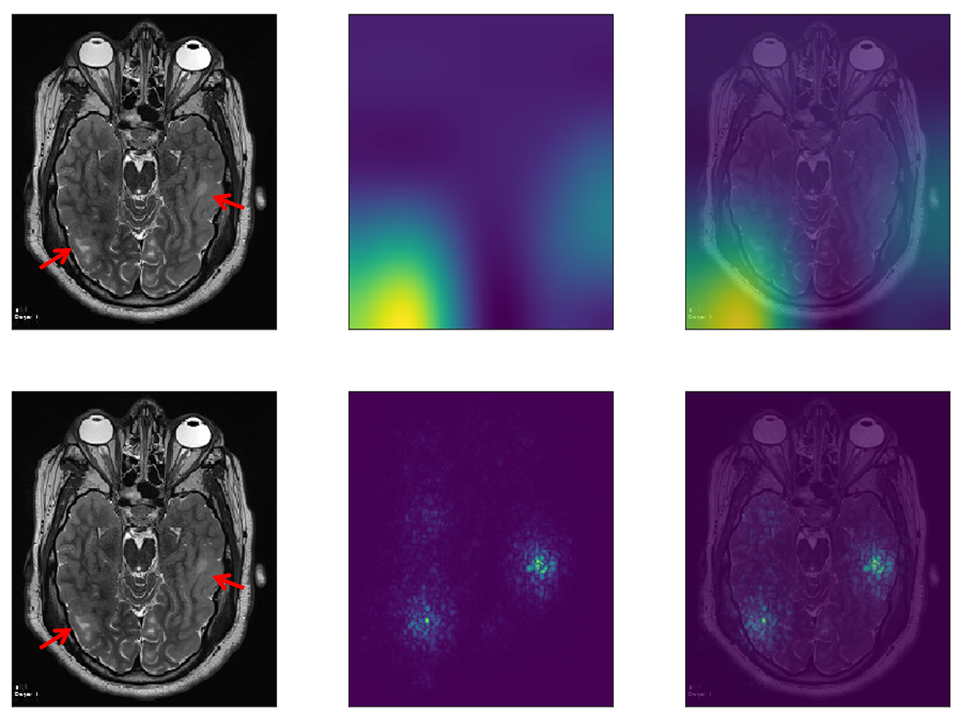
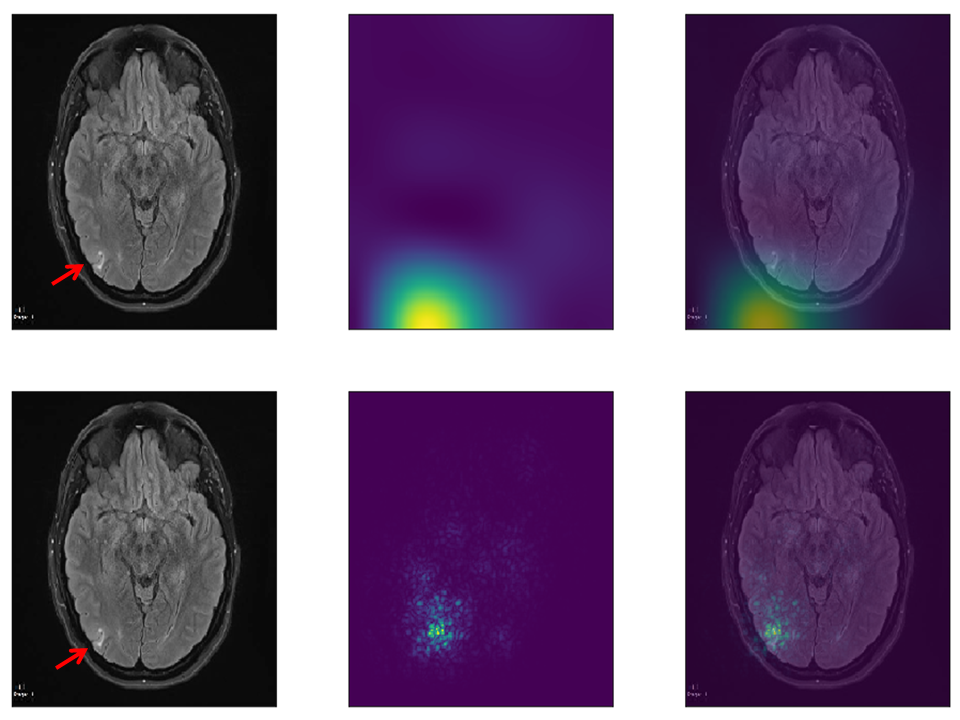
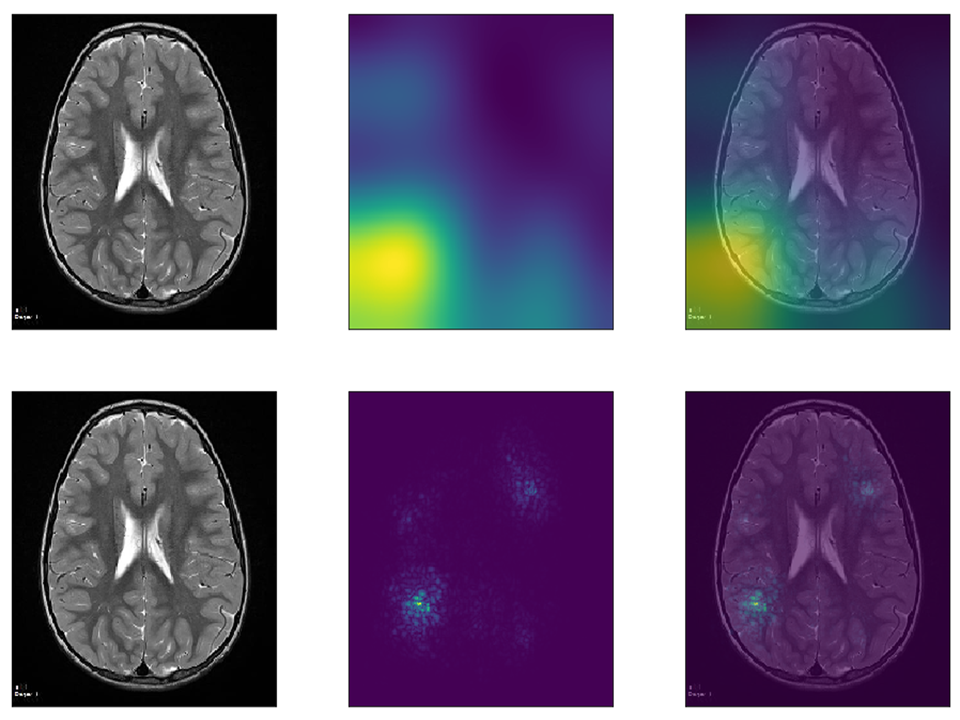
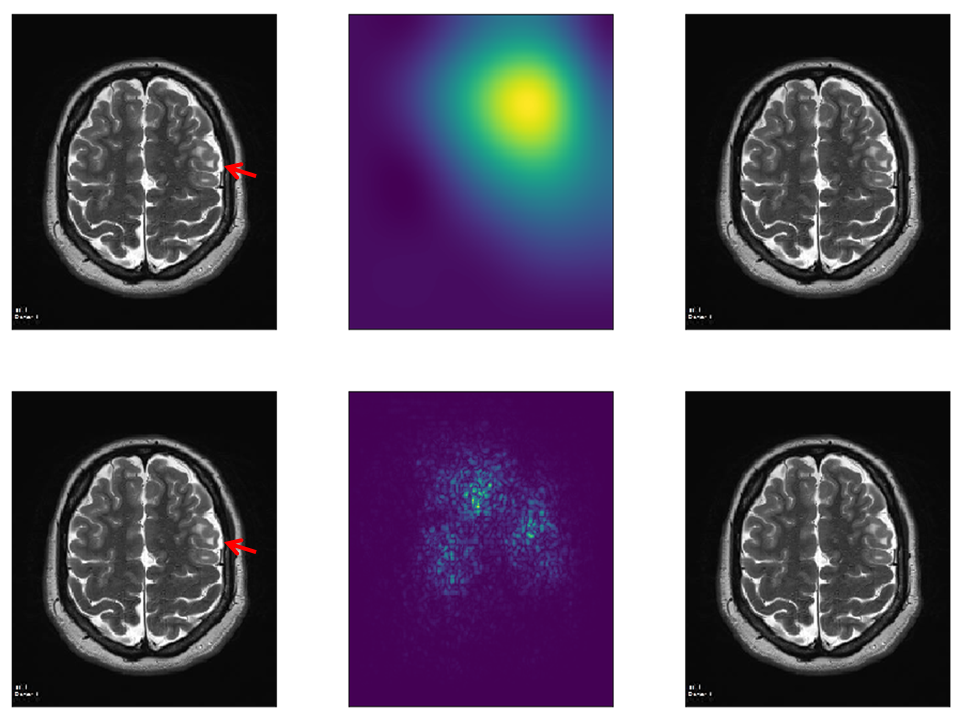
The first column represents the original image, the second column represents the map, and the third column represents the map superimposed on the original image. The first row represents the gradient-weighted class activation map, and the second row represents the saliency map.¶